e
quer mais?
Me paga um café! :) PIX consultoria@carlosdelfino.eti.br
Curta o post no final da página, use o Disqus, compartilhe em sua rede social. Isso me ajuda e motiva
Obrigado.
Vamos começar estudando alguns conceitos. Depois veremos como usar básicamente o Bluetooth no Arduino.
Conceitos Básicos do BlueTooth
Para se atuar com projetos relativos ao BlueTooth é fundamental que se conheça alguns conceitos Básicos, que serão listados e explicado logo abaixo.
Protocolo BlueTooth
Acima de tudo o BlueeTooth é um protocolo, além do hardware existe um procedimento que define como o hardware Bluetooth se comunica e se comporta na presença de outros hardwares que usam a mesma frequência.
Para uso com o Arduino, é apenas necessário que se compreenda que o Bluetooth usa a frequencia de 2.4Ghz, e que apesar disso não se comunica com outros equipamentos, como Wi-FI.
É importante saber que o Bluetooth é definido pelo padrão 802.15.1 do IEEE.
Frequência de Trabalho do BlueTooth
O Bluetooth é definido pela norma IEEE 802.15.1 e utiliza a mesma frequência utilizada por diversos outros protocolos de rede como WiFI definido pelo IEEE 802.11 e ZigBee mais conhecido na implementação xBee que é definido pela norma IEEE 802.15.4.
A Frequência usada por todos esta normas é a 2.4Ghz e não pode ser alterada porem a norma define claramente como deve ser gerido os conflitos quando multiplos tipos de equipmantos se fazem presente no mesmo ambiente, portanto não havendo uma sobrecarga o Bluetooth irá funcionar adequadamente mesmo em ambientes densamente povoados por WiFi, como ocorre em algumas regiões centrais, um exemplo é o centros de capitais como São Paulo, Rio e Belo Horizonte.
| Nome | Bluetooth Classic | Bluetooth 4.0 Low Energy (BLE) | ZigBee | WiFi |
|---|---|---|---|---|
| Padrão IEEE | 802.15.1 | 802.15.1 | 802.15.4 | 802.11 (a, b, g, n) |
| Frequência (GHz) | 2.4 | 2.4 | 0.868 0.915 2.4 |
2.4 e 5 |
| Máximo bit rate bruto (Mbps) | 1-3 | 1 | 0.250 | 11 (b) 54 (g) 600 (n) |
| throughput médio (Mbps) | 0.7-2.1 | 0.27 | 0.2 | 7 (b) 25 (g) 150 (n) |
| Distância Máxima (Outdoor) em Metros | 10 (class 2) 100 (class 1) |
50 | 10-100 | 100-250 |
| Consumo relativo de potência | Médio | Muito Baixo | Muito Baixo | Alto |
| Tempo de Vida da Bateria | Dias | Meses a Anos | Meses a Anos | Horas |
| Tamanho da Rede | 7 | Indefinido | >64000 | 255 |
Tal faixa de frequência é chamado de Spectrum é abrange a frequência de 2.4 a 2.485Ghz que é a Faixa ISM, uma faixa que não precisa de licensiamento pois é usada para uso industrial, cientifico e médico mas isso não a torna uma frequência aberta que pode ser usada indiscriminadamente.
O Bluetooth divide tal faixa de frequeência em 79 canais de 1Mhz cada, que são alternados de forma a fugir das interferências, podendo fazer isso 1600 vezes por segundo o que é indicado como sendo 1600 hops/sec.
Range (distância) e Potência
O Bluetooth na sua versão atual chega a consumir 1/100 da potência dos primeiros bluetooths produzidos que já eram bastante económicos e foram desenvolvidos para funcionarem por longos periodos com baterias.
Os dispositivos Bluetooth são divididos em classes como listado a seguir:
- Class 3 - Tem transmissão de 1 metro (em torno de 3 pés)
- Class 2 - normalmente encontrados em telefones celulares e atingem até 10 metros (33 pés)
- Class 1 - usado primáriamente na industria e atingem 100 metros (300 pés)
Os rádios Bluetooth de Classe 2 chegam a 2.5mW de potência de transmissão.
| Classe | Potência Max Saída (dBm) | Potência Máxima em (mW) | Distância Máxima |
|---|---|---|---|
| 1 | 20 dBm | 100 mW | 100 m |
| 2 | 4 dBm | 2.5 mW | 10 m |
| 3 | 0 dBm | 1 mW | 10 cm |
A infraestrutura do Bluetooth
O Bluetooth tem dois tipos de dispositivos:
- Escravo / Slave - São normalmente fones de ouvidos, mouses e teclados estes dispositivos atuam apenas como escravos de um um unico dispositivo mestre e somente se comunica com ele, não se comunicando com outros slaves e nenhum outro mestre, além do que foi inicialmente pareado. Porém o mestre pode ser mudado.
- Mestre / Master - São normalmente os computadores e celulares, eles também podem atuar como escravo, porém somente um master pode existir na rede Bluetooth, os demais devem ser escravos.
A rede Bluetooth é chamada de Piconet em alusão ao seu tamanho reduzido, já que são limitadas a 7 dispositivos no Bluetooth comum, porém no Bluetooth LE é possível chegar até a mais de 5000 (cinco mil) dispositívos.
É responsabilidade do master coordenar a PicoNet Bluetooth, e pode enviar e receber dados dos slaves.
Como os dispositivos são endereçados
Na rede PicoNet do Bluetooth mesmo com poucos dispositivos, em sua versão comum, utiliza um tipo de endereço similar ao utilizado em redes Ethernet, onde cada placa de rede tem um endereço MAC (Media Access Control), cada dispositivo Bluetooth tem também um endereço MAC para cada dispositivo fabricado.
Os Endereços MAC do bluetooth são compostos por 48 bits, sendo que os primeiros 24 identificam o fabricante, e os 24 restante representam o dispositivo. Tais endereços são atribuidos individualmente a cada equipamento e não é permitido que haja equipamentos compartilhando um endereço.
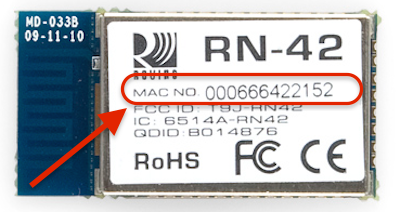
Como pode ser visto na figura acima, o endereço MAC já vem definido de fábrica, e é representado por 12 digitos hexadecimais.
Além do endereço MAC cada dispositivo Bluetooth pode ter um nome atribuido, o RN-42 por exemplo vem com um nome como sugerido na imagem abaixo.
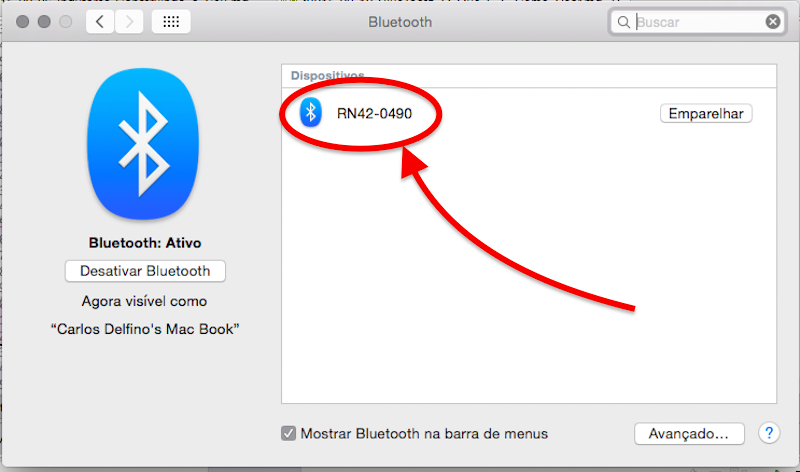
Os dispositivos podem ter um nome com até 248 caracteres, e podem até compartilhar nomes, porém os dois últimos digitos do MAC será adicionado ao nome para diferencia-los.
O Processo de conexão
O processo de conexão com dispotivos bluetoot é composto por alguns passos e definidos por três estados, listados abaixo:
-
Inquiry - se dois disposivos bluetooth são completamente desconhecidos entre sí, um dos dispositivos deve ser capaz de enviar uma mensagem do tipo “Inquiry”, assim os demais dispositivos desconhecidos enviaram informações como seu MAC e nome;
-
Paging (Conectando) - Páging é o processo de formar uma conexão entre dois dispositivo Bluetooth, Antes desta conecão ser inicializada, cada dispositivo precisa conecer o endereço do outro (encontrado pelo pelo processo “Inquiry”);
-
Connection - Após o dispositivo completar o processo “Paging”, ele entra no estado “Connection”. Enquanto conectado “Connection”, o dispositovo pode ser um participante ativo na Piconet ou estar em modo de baixo consumo de energia, “Sleep Mode”. Abaixo estão listados os modos que o dispositivo pode estar:
- “Active Mode” - Este é o modo padrão quando conectado, quando o dispositivo está ativo, transmitido ou recebendo dados;
- “Sniff Mode” - Este é um modo de economia de energia, quando o dispositivo está com baixa atividade. Ele dormirá (sleep) e somente escutará por transmissões em um determinado intervalo (por exempo a cada 100ms);
- “Hold Mode” - é um modo temporario, entra em modo de economia de energia (Power-Saving) e retorna em um intervalo de tempo programado para o modo “Active”. O Master pode comandar o Slave para entrar em “Hold Mode”;
- “Park Mode” - “Park” é como o “Sleep Mode”, porém mais proundo, um dispositovo Master pode comandar um Slave a entrar em modo “Park”, e este slave ficará inativo até que o master o comande novamente para acordar;
Quando dois dispositivos estão pareados este podem estar em um estado chamado “Bonding”, neste estado tais dispositivos são colocados em afinidade de tal forma que sempre que se encontram novamente se conectam sem precisar nenhum processo de validação. Isso se dá com equipamentos como carros dotados de Bluetooth e Celulares, tal processo é definido durante o ato de “Parear” os Dispositivos, onde cada um armazena informações de segurança relativas ao outro em sua mémoria.
Perfil do Bluetooth
A especificação do Bluetooth, define perfis que podem ser adotados por cada dispositivo, na tabela abaixo estão listados alguns perfis. Lembrando que no nosso caso o Perfil mais indicado é o SPP (Serial Port Profile) já que estaremos apenas em primeiro instante buscando criar uma forma de conexão virtual entre dois dispositivos, uma conexão serial sem fio. Principal útilidade no qual inspirou os primeiros dispositivos Bluetooth.
Não vou listar por hora os perfis existentes para o Blootooth, já que para este artigo apenas o SPP nos atenderá, mas caso deseje conhecer quais perfis podem exister, existe uma excelente Lista de perfis no Wikipedia.
Conectando o Arduino ao Bluetooth
O esquema abaixo é nossa referência para os projetos. estaremos usando neste tutorial o móduo Bluetooth RN-42 da Sparkfun, este módulo é bastante versátil, atuando como Slave e Master, e com outros profiles para HID além do SSP.
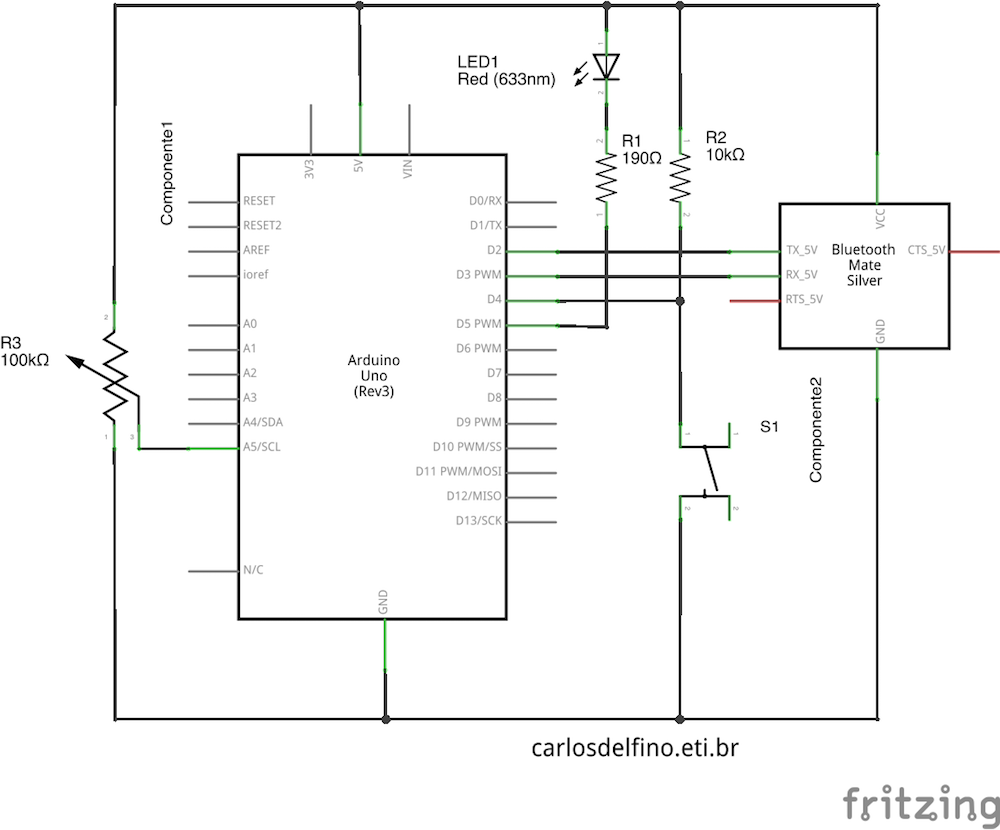
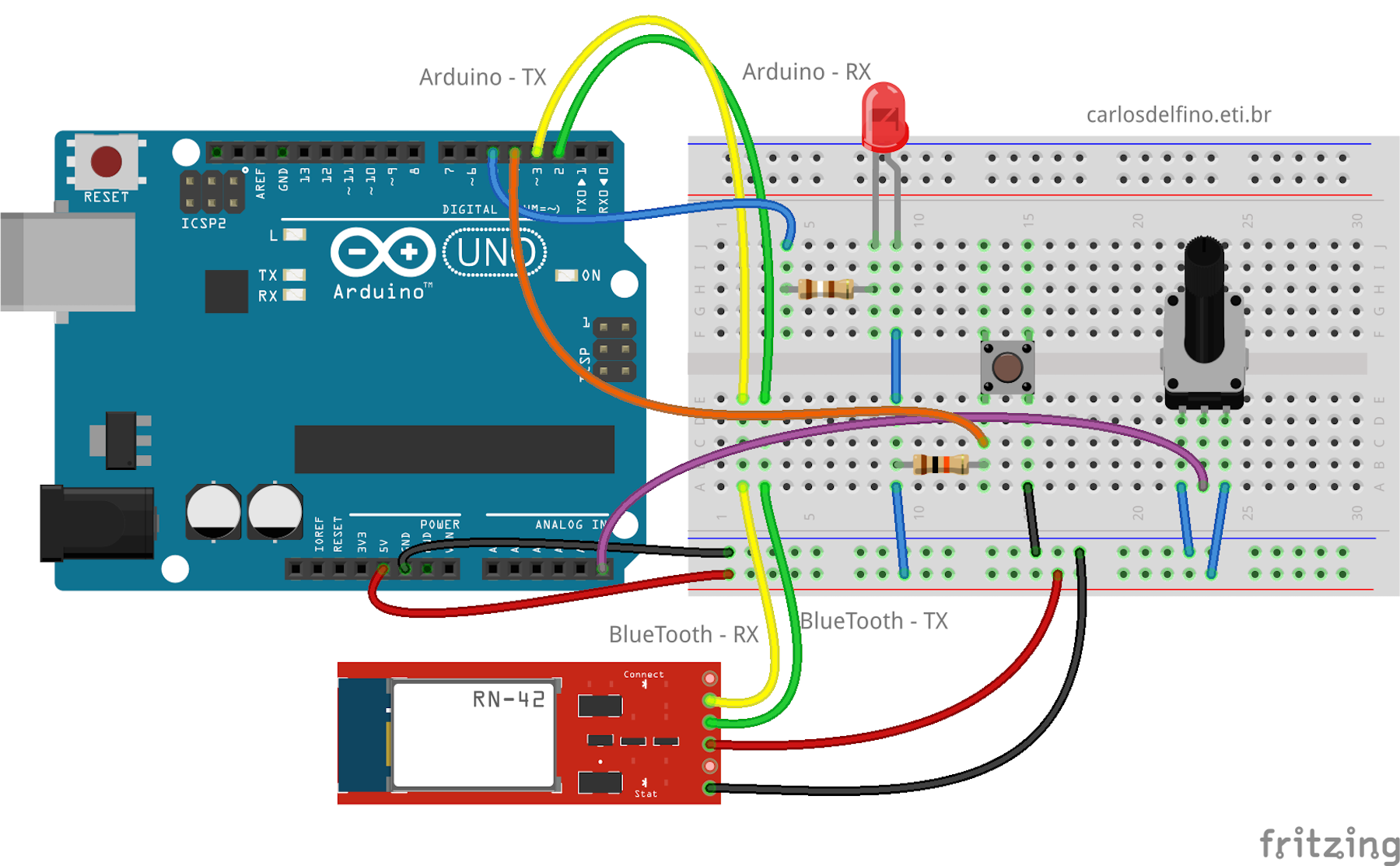
A seguir está este mesmo esquema montado em uma protoboard.
Significado da sinalização dos LEDs
Há dois LEDS normalmente nos modens Bluetooth e no RN-42 eles se comportam da seguinte forma:
- O LED vermelho com a indicação “Stat”:
- piscando 10 vezes por segundo está em modo de configuração
- piscando 2 vezes por segundo, o móduo não está em configuração, mas o tempo para entrar no modo está contando.
- piscando 1 vez por segundo está nos modos “Discoverable”/”Inquiring”/”Idle”, fora do modo de configuração, e o tempo de configuração venceu.
Configurando e controlando o Módulo Bluetooth
O Módulo Bluetooth indepedente de sua funcionalidade principal pode estar em dois modos principais, um é no modo de configuração o outro é quando está em comunicação com o outro Bluetooth, assim seu canal de comunicação, normalmente a serial, se torna a via de comunicação física do tunel formado pelo protocolo Bluetooth entre os equipamentos.
Um primeiro código
Abaixo está um primeiro código que usaremos para comunicar diretamente com o Bluetooth é sugerido pela Sparkfun e neste estágio nos atende perfeitamente, já que nosso objetivo é apenas testar a comunicação com o Modem Bluetooth em modo de Comando.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
language:c
/*
Example Bluetooth Serial Passthrough Sketch
by: Jim Lindblom
SparkFun Electronics
date: February 26, 2013
license: Public domain
Este sketch de exemplo converte um modulo bluetooth RN-42
para comunicar em 9600 bps (dos 115200 padrões), e passa
algum dado serial entre o "Serial Monitor" e o moduo.
*/
// O projeto precisa da SotwareSerial para usar os pinos
// 2 e 3 como porta serial.
#include <SoftwareSerial.h>
#define bluetoothTx 2 // TX-O pin of bluetooth mate, Arduino D2
#define bluetoothRx 3 // RX-I pin of bluetooth mate, Arduino D3
// veja não precisamos de um objeto especial para lidar com o módulo
SoftwareSerial bluetooth(bluetoothTx, bluetoothRx);
void setup()
{
Serial.begin(9600); // Inicializa o serial monitor em 9600bps
bluetooth.begin(115200); // O Bluetooth inicia a conexão em 115200bps
bluetooth.print("$"); // Deve ser impressos três "$" individualmente!
bluetooth.print("$");
bluetooth.print("$"); // Para entrar em modo de comando
delay(100); // Aguarda 100 mS para entrar em modo CMD
bluetooth.println("U,9600,N"); // Altera o baudrate para 9600, sem paridade.
// 115200 pode ser muito rápido para uso com SoftwareSerial
bluetooth.begin(9600); // Iniciar bluetooth serial em 9600
}
void loop()
{
if(bluetooth.available()) // Se o Módulo Bluetooth enviar algum caracter
{
// envia o caracter recebido do módulo para o Serial Monitor
Serial.print((char)bluetooth.read());
}
if(Serial.available()) // Se algo foi digitado e enviado no Serial Monitor
{
// Envia o caracter para o Módulo Bluetooth
bluetooth.print((char)Serial.read());
}
// Fica em loop infinitamente!!!
}
Fontes
- http://en.wikipedia.org/wiki/Frequency-hopping_spread_spectrum
- http://www.wirelessdevnet.com/channels/bluetooth/features/bluetooth.html
- http://www.bluetooth.com/Pages/Basics.aspx
- https://learn.sparkfun.com/tutorials/bluetooth-basics
- https://learn.sparkfun.com/tutorials/using-the-bluesmirf/hardware-hookup
- https://www.bluetooth.org/en-us/specification/adopted-specifications
- http://www.ncbi.nlm.nih.gov/pmc/articles/PMC3478807/
- http://en.wikipedia.org/wiki/MAC_address
- https://developer.bluetooth.org/TechnologyOverview/Pages/Profiles.aspx
Não deixe de me pagar um café, faz um PIX: consultoria@carlosdelfino.eti.br de qualquer valor.