e
quer mais?
Me paga um café! :) PIX consultoria@carlosdelfino.eti.br
Curta o post no final da página, use o Disqus, compartilhe em sua rede social. Isso me ajuda e motiva
Obrigado.
Este Artigo foi baseado no tutorial VirtualWire Library do site PJRC de Paul e Robin - Eletronic Projects Components Available Worldwide e também no site original VirtualWire Library no site AirSpayce.com disponibilizada por Mike McCauley, além de outras fontes.
O Módulo RF adequado para este uso pode ser adquirido com nosso parceiro Arduino Omega
O módulo RF 433mHz é um modulo que atua na faixa de Rádio conhecida como SubGiga, é uma fáixa amplamente usada por rádio amadores e também por controle remoto, não percebemos interferencia entre os dois uso porque são poucos rádio amadores que utilizam tal faixa, como também a potência usada por controle remotos é muito baixa, por isso não é considera como uma boa opção para uso como modem via RF, mas sem dúvida, é uma das opções mais baratas que temos para montar equipamentos que precisam se comunicar sem fio. Ou mesmo ampliar a integração de nosso sistema desenvolvido com o Arduino e equipamentos de automação, como portões eletrônicos de garagem.
A frequência é 433 ou 315Mhz?
Os módulos SubGiga, irei chama-los sempre assim, podem atuar tipicamente em duas frequências abaixo da faixa de 1Ghz:
- 433MHz,
- 315Mhz,
Isso não interfere em nada no protocolo e na forma de funcionamento, nem mesmo na velocidade de transmissão de dados.
As duas frequências 433Mhz e 315Mhz, são amplamente usadas em controle remotos para portões automáticos, e também para carros.
Na maioria dos módulos muda-se apenas a bobina do filtro no receptor, e o cristal resonador no transmissor.
Potência
O mais interessante é a potência necessária para este módulo funcionar, conforme o FCC (orgão americano que regula as telecomunicações), é equivalnte a 0,001% da potência de uma lampada de 25W ou seja 0,25mW, e mais intereesante é que apenas 0,00000002% da potência transmitida precisa chegar intacta na outra ponta para se atingir uma velocidade de 2000bps (2000 bauds por segundos, sendo neste caso 2000 bits por segundo).
Usando uma antena de boa qualidade a uma altura de 1,60m do chão, pode se atingir uma distância de até 1700m, em ambiente aberto.
O que podemos considerar uma excelente velocidade além de uma incrível distância com tal potência.
Como os Dados são Codificados
Antes de prosseguir é importante compreender alguns conceitos como a diferença em Modulação e Codificação, para tanto leia o artigo Conceitos Sobre Comunicação Os modulos SubGiga, usam a codificação ASK/OOk ou seja, eles modulam a amplitude do sinal, em outras palavras a intensidade, conforme o nível em que se encontra a porta de dados.
Portanto se for nível 1 (5V) é emitido sinal na frequência de 433/315Mhz, sendo zero não é emitido nenhum sinal naquela frequência, e é por essa modulação/codificação que este tipo de rádio está tão sujeito a interferência, assim é preciso inserir uma segunda condificação sobre a codificação OOK para aumentar sua confiabilidade.
Porque VirtualWire
Na verdade o nome Virtual Wire é o nome da biblioteca que foi criada para uso com este módulo por Mike McCauley, esta biblioteca não é mais mantida, já que se tornou ultrapassada e foi substituida pela RadioHead, uma biblioteca mais robusta e com mais recursos de códificação, endereçamento e outros recursos uteis para sistemas de comunicação de dados via rádio, porém não iremos tratar tal biblioteca neste artigo, apenas a VirtualWire que é ainda amplamente utilizada.
O nome VirtualWire é bem expressívo, já que se você tira os radios e liga o pino de transmissão com o pino de repeção você conseguirar obter o dado transmitido da mesma forma que usando os rádios, por isso o nome foi escolhido.
Arduino 1———-wires———Arduino 2
(RX)D11—————————–D12(TX)
(TX)D12—————————–D11(RX)
GND-----------------------------GND
Modulação AM
Outra característica muito interessante deste módulos é o fato deles poderem ser usados como transmissores de áudio como usam a modulação por amplitude irão se comportar com um par, receptor transmissor AM, porém na faixa de 433/315Mhz.
Apenas o Receptor precisará de um acoplamento para converter sua saída de 5V para um nível adequado para uso com amplificadores.
Eu nunca testei tal característica, mas é amplamente comentada, apesar de pouco documentada.
Instalando a Biblioteca VirtualWire
Instalar a biblioteca é muito simples, para tal é preciso baixar o arquivo de instalação da última versão que ainda está disponível, clicando aqui, esta é a versão 1.27 do site oficial, algumas pessoas tem baixado a versão de Paul e Robin do site PJRC, que na verdade é a versão 1.15 da original.
Para instalar o procedimento é padrão, basta descompactar o arquivo e copiar o diretório VirtualWire para a pasta “Library” do Arduino em “Meus Documentos” (caso esteja usando windows), cuide para que a estrutura de diretórios esteja preservada.
Usando a Biblioteca
Vejamos abaixo um pequeno exemplo de como usar a biblioteca. Já estarei publicando o artigo apartir daqui para que possam comentar e solicitar informações sobre o uso da biblioteca assim posso direcionar um pocuo conforme as dúvidas apresentadas.
Conectando os Fios
Vai um video so para verificar como ficou suas conexões.
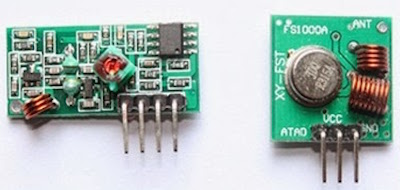
Na figura acima podemos ver o a esquerda o módulo receptor, e a direita o módulo transmissor. É importante observar que ambos funcionam adequadamente a 5V, porém o módulo transmissor pode ser alimentado com até 12V para aumentar sua potência de transmissão.
Atenção: Nenhum dos módulos deve ter seu pino de dados conectado em pinos que tenha uma maior drenagem de corrente que o próprio pino do Arduino, ou seja na faixa dos uA (Micro Ampér), isso acontece porque o circuito dos módulos não são capazes de fornecerem corrente suficiente para alimentar por exemplo LEDs.
A pinagem a ser usada segue a tabela abaixo:
Pinagem Módulo Transmissor:
Pinagem conforme a imagem acima da esquerda para a direita:
| Pino | Função | Obs. |
|---|---|---|
| 1 | VCC | No transmissor pode se fornecer uma alimentação de 3,5V a 12V conforme a potência de sinal desejada. |
| 2 | Dados | O pino 2 e 3 são identicos fornecendo o sinal de dados |
| 3 | Dados | Identico ao pino 2 |
| 4 | GND | Deve ser conectado ao GND ou terra |
O Transmissor deve estar conectado ao pino 11, veremos mais detalhes sobre isso na analise do código.
Pinagem do Módulo Receptor
Atenção: O módulo receptor funciona adequadamente com 5V. Não deve ser ligado a tensões superiores, isso não irá melhorar seu funcionamento.
| Pino | Função | Obs. |
|---|---|---|
| 1 | Dados | Ligar ao pino de entrada de dados que será usado no arduino. |
| 2 | VCC | Este pino deve ser ligado a 5V, não há melhoria na recepção em ligar em tensões mais altas |
| 3 | GND | GND ou Terra |
Já o Receptor deve estar conectado ao pino 12, veremos mais detalhes sobre isso na analise do código.
Alguns cuidados com a Biblioteca
Como esta biblioteca usa os pinos 11 e 12 (veremos mais a frente como mudar
os pinos), e também usa o Timer 1, ela pode sofrer ou causar interferências
com outras bibliotecas.
Observe que os pinos 11 e 12 no Arduino Uno são compartilhados com o conector ICSP, usado no protocolo SPI, isso pode conflitar com shields que tem SDCard entre outros.
Fique atento a tal fato, e não se esqueça de verificar se outras bibliotecas
não estão usando o Timer 1.
Já o Arduino Mega não há conflitos nestes dois pinos, já que os equivalentes do ICSP estão nos pinos 52 e 50.
Antena
Ambos os módulos tem um ponto de solda para se conectar uma antena comum, um simples fio de aproximada 20cm no minimo 19cm (você pode enrola-lo em uma caneta tipo BIC para ficar melhor condicionado).
Não entrarei em detalhes aqui sobre a confeção da antena, mas em breve irei fazer um novo post sobre o tema.
O Código
Agora que você está com tudo conectado conforme apresentado acima, vamos analisar como usar o código da biblioteca VirtualWire.
Iremos usar os dois exemplos que acompanha o código para analisar o funcionamento do código e as melhores formas de usar a biblioteca.
A biblioteca utiliza diversas funções separadas para preparar o ambiente, uma vez que é precisar usar interrupções como a do Timer 1 para gerir alguns processos não é muito adequado o uso de classes, apesar de não ser impossível, portanto os desenvolvedores optarem em usar C puro ao invez de C++.
O Código do transmissor
Veja o código abaixo usado para o transmissor:
#include <VirtualWire.h>
void setup()
{
Serial.begin(9600); // Debugging only
Serial.println("setup");
// Initialise the IO and ISR
vw_set_ptt_inverted(true); // Required for DR3100
vw_setup(2000); // Bits per sec
}
void loop()
{
const char *msg = "hello";
digitalWrite(13, true); // Flash a light to show transmitting
vw_send((uint8_t *)msg, strlen(msg));
vw_wait_tx(); // Wait until the whole message is gone
digitalWrite(13, false);
delay(200);
}Inicialmente você deve incluir o cabeçalho da biblioteca com a diretiva #include <VirtualWire.h>.
Em seguida na função setup() você deve definir como irá funcionar o controle de
portadora, ptt, que significa Press-to-Talk é um termo usado no rádio amador
para ativar a portadora que será modulada, representando a chave do microfone,
que é precionado na hora de falar. Como o rádio usa a mesma faixa de frequência
e canal (subfaixa) para enviar e receber, quando se usa dois pares de transmissores
e receptores, criando uma comunicação bi-direcional. Este módulo funciona exatamente
como o rádio amador.
Bem, estes módulos não possuem o recurso de PTT, porém podemos simular sua presença, ativando ou desativando a alimentação do transmissor, mas lembre-se não conecte o transmissor diretamente a porta do arduino, use um transitor como driver.
Neste exemplo a função vw_set_ptt_inverted(true)está indicando a lógica inversa
para ativar ou não o PTT, ou seja quando alto está desativado, quando baixo
está ativo.
E finalmente, finalizando o processo de setup setup() é preciso definir a
velocidade que se deseja transmitir o bits, no caso foi definida como sendo
2kbs (dois mil bits por segundo), veja não se faz referência a bauds já que
não há uma codificação complexa.
No loop() foi sugerido uma mensagem de teste “hello”, apenas para
demonstrar o envio de uma string, iremos discutir mais a baixo o envio de
comandos numéricos. Essa string é armazenada em um array de chars, apesar
do formato pouco típico no Arduino o produto é o mesmo, um ponteiro do típo
char ou um array de chars.
Neste exemplo LED do pino 13 é usado para sinalizar o tempo gasto para envio da mensagem. Então ele é ativado.
E finalmente com a função vw_send(uint8_t*,uint8_t) é usada para enviar a
sequência de dados.
Veja uint8_t é um tipo de dados primítivo do C que representa um byte sem
representação de sinal, neste caso pode ser um char (sem sinal), ou mesmo
o tipo byte (sem sinal).
Portanto, qualquer informação composta por bytes, pode ser enviada por esta função, veremos mais baixo na seção Enviando comandos números, formas diferentes de enviar dados.
E para garantir a transmissão a função vw_wait_tx() é chamada, essa função tem
o mesmo comportamento que a função flush() da porta serial, ela apenas esqera
que todos os dados sejam transmitidos, dando continuidade então ao código.
Como a biblioteca VirtualWire usa o Timer1 para gererir a sinalização e a amplitude
do sinal a ser enviado, outros processos podem ser executados normalmente, sem
que seja preciso aguardar o total envio dos dados, porém é sempre bom chamar
a função vw_wait_tx() para que se faça um ponto de sincronismo e se certifique
que todo os dados foram enviados.
E fechando o loop o LED 13 é desativado e se aguarda com um delay de 200ms a próxima interação.
O Código do receptor
O código do receptor e tão simples quando do transmissor, no processo de setup()
deve se observar apenas que para receber dados é preciso abilitar o receptor
chamando a função vw_rx_start(), esta função ativa o receptor e o PLL por
software para decodificação dos dados enviados.
#include <VirtualWire.h>
void setup()
{
Serial.begin(9600); // Debugging only
Serial.println("setup");
vw_set_ptt_inverted(true); // Required for DR3100
vw_setup(2000); // Bits per sec
vw_rx_start(); // Start the receiver PLL running
}
void loop()
{
uint8_t buf[VW_MAX_MESSAGE_LEN];
uint8_t buflen = VW_MAX_MESSAGE_LEN;
if (vw_get_message(buf, &buflen)) // Non-blocking
{
int i;
digitalWrite(13, true); // Flash a light to show received good message
// Message with a good checksum received, dump it.
Serial.print("Got: ");
for (i = 0; i < buflen; i++)
{
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println("");
digitalWrite(13, false);
}
}No código para o receptor você deve sempre estar aguardando uma nova mensagem,
veja que a função vw_get_message() usada neste exemplo não bloqueia o código,
ela verifica se há alguma mensagem disponível que seja válida, retornando verdadeiro
e gravando a mensagem no buffer, caso volte com falso, ela não interfere no conteúdo
da variável ‘buf’, veja que esta variável deve ser um array, e deve ser capaz de
receber a messagem do tamanho que se espera, caso contrário o excedente será descartado.
Se a mensagem recebida for menor do que a esperada, será retornado apenas o que foi recebido.
Atenção: você deve passar um ponteiro para o comprimento da mensagem também assim vw_get_message() irá atualizar a variável que contem o comprimento da mensagem esperada pelo comprimento da mensagem recebida.
Mudando os pinos de dados Transmissor/Receptor
Baixo estão algumas funções que podem usar para mudar os pinos de controle e dados da biblioteca.
Veja que isso deve ser feito na função setup()e antes de chamar a função vw_setup().
Setando novo pino para o TX
void vw_set_tx_pin(uint8_t pin) deve ser usada para mudar o pino de transmissão
ligado ao módulo transmissor, você pode usar qualquer pino livre do arduino.
Setando novo pino para o RX
void vw_set_rx_pin(uint8_t pin) deve ser usada para mudar o pino de receptor
ligado ao módulo receptor, você pode usar qualquer pino livre do arduino.
Setando novo pino para o PTT
void vw_set_ptt_pin(uint8_t pin) deve ser usada para mudar o pino de controle
do PTT, para qualquer um dos módulos, você pode usar qualquer pino livre do arduino.
Enviando comandos numéricos.
Como a função vw_send() foi escrita para enviar um array de uint8_t o envio de comandos
numéricos se faz muito simples, bastando para tanto estabelecer o tamanho do comando em
bytes e informar o ponteiro para a variável que se deseja obter a sequência de bytes.
Sendo a variável apenas um byte, bastará apenas passar a posição desta variável e o tamanho como sendo um veja abaixo:
byte uma = 22;
vw_send((uint8_t *)&uma,1);Veja que é importante sempre usar tipos equivalentes e facilmente convertidos em uint8_t.
ou seja, char, int, byte para o Arduino UNO ou Arduino Mega (é prciso muito
cuidado ao usar o Arduino DUE já que um int no arduino DUE, é uint32_t/int32_t, ou
seja ocupa 4 bytes), veja mais informações sobre tipos de dados no Arduino, clicando aqui
Já no lado do receptor basta esperar uma mensagem de apenas um byte:
uint8_t buf[1];
uint8_t buflen = 1;
if (vw_get_message(buf, &buflen)) // Non-blocking
{
...
}Não deixe de me pagar um café, faz um PIX: consultoria@carlosdelfino.eti.br de qualquer valor.